TrackNeRF: Bundle Adjusting NeRF from Sparse and Noisy Views via Feature Tracks
 Reconstruction quality v.s. baselines under 35% camera noise from 3 views
Reconstruction quality v.s. baselines under 35% camera noise from 3 viewsMethod Overview
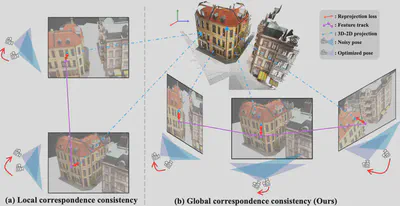
Our method addresses the challenge of learning NeRF from sparse and noisy views by enforcing holistic multiview consistency through track-based bundle adjustment. Unlike prior methods that only use local pairwise constraints, we introduce a track-wise loss that aligns feature correspondences across all views.
Track-Based Bundle Adjustment
Given that all views originate from a single 3D scene, corresponding points across all views should project back to the same 3D landmark. Inspired by bundle adjustment (BA) in Structure-from-Motion, we formulate a track-wise objective that minimizes the reprojection error across all feature correspondences in a track:
\[ E_{BA}=\sum_k \sum_{(\mathbf{u}_i,\mathbf{v}_j)\in \mathcal{T}_{(k)}} \| h (\mathbf{u}_i) - \mathbf{v}_j \| \]where \((\mathbf{u}_i,\mathbf{v}_j)\) are correspondences inside feature track \(\mathcal{T}_{k}\). The function \(h\) lifts a pixel onto its 3D location and projects it to another view, enforcing holistic consistency across all images.
Track Extraction
Feature tracks are extracted by linking dense correspondences across multiple images. Given a feature matcher, correspondences between image pairs are chained transitively to form continuous tracks, ensuring that every feature track represents a set of 2D points corresponding to the same 3D point:
\[ \mathcal{T}_k = \{\mathbf{u}, \mathbf{v}, \mathbf{q}, ...\} \]To improve accuracy, we jointly optimize feature correspondences across all views.
Track Keypoint Adjustment
To refine the extracted feature tracks, we optimize keypoint locations by minimizing the feature distance between matched points:
\[ E^k_{TKA}=\sum_{(\mathbf{u}_i,\mathbf{v}_i)\in \mathcal{T}_{(k)}} w_{\mathbf{u}_i\mathbf{v}_j} \| \mathbf{F}(\mathbf{u}_i) - \mathbf{F}(\mathbf{v}_j) \| \]where \(\mathbf{F}\) extracts pixel-wise features, and \(w_{\mathbf{u}_i\mathbf{v}_j} \) is the matching confidence. This track-wise keypoint adjustment improves multiview consistency and provides more accurate keypoints for NeRF supervision.
Track Reprojection Loss
Previous NeRF methods optimize correspondence at the pairwise level, which can introduce inconsistencies due to local feature extractor noise. To address this, we propose a track reprojection loss that enforces global geometric consistency. This loss minimizes the reprojection error of all correspondences in a feature track, ensuring that all feature points align with the same 3D landmark:
\[ \mathcal{L}_{\text{Track}} = \sum_k \sum_{(\mathbf{u}_i,\mathbf{v}_j)\in \mathcal{T}_k} \frac{1}{| \mathcal{T}_k| } \rho \left( \mathbf{u}_i - \pi \left( \hat{P}_i^{-1} \hat{P}_j \pi^{-1} ( \mathbf{v}_j, \hat{z}(\mathbf{v}_j; \theta, \hat{P}_i) ) \right) \right) \]where \(\rho\) is the Huber loss function, \(\pi\) is the camera projection function, and \(\pi^{-1}\) is the backprojection operator using the depth \(\hat{z}(\mathbf{v}_j; \theta, \hat{P}_i)\). This loss enforces consistency of all-to-all correspondences in a feature track.
Depth Regularization
To enhance NeRF’s geometry, we introduce depth regularization inspired by monocular depth estimation. This loss encourages depth gradients to align with image gradients:
\[ \mathcal{L}_{\text{Depth}} = \sum_{i,j}^{\Psi} | \nabla_x D^{\Psi}_{ij} | e^{-\| \nabla_x I^{\Psi}_{ij} \| } + | \nabla_y D^{\Psi}_{ij} | e^{-\| \nabla_y I^{\Psi}_{ij} \| } \]where \(\nabla\) is the vector differential operator, \(D\) is the disparity map (reciprocal of depth), \(I\) is the RGB image, and \(\Psi\) represents sampled image patches. This helps to reduce artifacts such as floaters in NeRF reconstructions.
NeRF Training Objective
Our final objective combines photometric loss, depth regularization, and track reprojection loss:
\[ \mathcal{L} = \mathcal{L}_{\text{Photometric}} + \lambda_{\text{Depth}} \mathcal{L}_{\text{Depth}} + \lambda_{\text{Track}} \mathcal{L}_{\text{Track}} \]where \(\lambda_{Depth}\) and \(\lambda_{Track}\) control the weighting of the losses. This formulation enables joint optimization of NeRF and multiview feature correspondences, leading to improved consistency and 3D geometry reconstruction from sparse views.